


測量除鹽水流量用流量計的抗幹擾措施及其效果分析
點擊次(cì)數:2321 發布時(shí)間:2021-09-06 07:20:44
摘要:為了抑製和排除測量除鹽水流量用流量計測量過程中的幹擾(rǎo),提高信噪比,提高測量的精確(què)度和穩定性,討論了(le)測量除鹽水流量用流量計(jì)幾類幹擾噪聲產生的物理機理和特征,簡要闡述了測量除鹽水流量用(yòng)流量(liàng)計的幾種(zhǒng)硬件和軟件方麵的抗幹擾技術。硬(yìng)件方麵設計了高精度低功耗的矩形波激磁電路,並從激磁電路中引出(chū)A/D轉換器的參考電壓,提高了A/ D轉換結果的(de)抗幹擾能力。軟件方麵主要采用“計(jì)算斜率法”和(hé)“正負差值法”相結合的方法消除零點漂移。實驗表明(míng),這些方法在智能測量除鹽水流量用流量計的測量過程中取得(dé)了(le)明(míng)顯的效果。
測量除鹽水流量用流(liú)量計是利用法(fǎ)拉*電磁感應(yīng)定律來測量導電液體的體積流量的儀表,具有很(hěn)多(duō)突出的優點,例如:無(wú)可動部件,不會產生壓力損失和堵(dǔ)塞管道;測量導電介(jiè)質的流量,不受溫度、黏度、密度、壓力、雷諾數(shù)以及在一定範(fàn)圍內電導率(lǜ)變化(huà)的影響;測量原理為線性,精度高,測量範圍大;耐腐蝕(shí)性好並且可測量正反流速等等。但(dàn)在實際測量中,幹擾信號與有(yǒu)用的信號混在一起,它們不僅成分(fèn)複雜,而且有時候幹擾信號還會比流量信號(hào)大。在這種情況(kuàng)下(xià)怎樣(yàng)抑製和排除這些幹擾,提高信噪比,提高測量的精確度和穩定性就成了研製和使用測量除(chú)鹽水流量用流量(liàng)計的一個技(jì)術關鍵。
以往的測量除鹽水流量用流量計的設(shè)計很多還有待改進,例如(rú):激磁電路基本采(cǎi)用模擬式恒流源,功耗大的同時也引入了幹擾(rǎo),並且精確(què)度不高(gāo);轉換器大多使(shǐ)用8位(wèi)或16位的單片機,較為複雜的算法就難以實現或響應時(shí)間過慢(màn);抗幹擾主要集中(zhōng)在硬件(jiàn)電路的設計等。本係統采用32位ARM處理器,提高數據(jù)處理能力和算法複雜度;並設計了低功耗的激磁電路(lù),同時利用(yòng)反饋原理消除激勵電流不穩定對A/D轉(zhuǎn)換結果的影響並在軟件算法和硬件電路方麵提出了有效的消除零點漂移(yí)以及其他幹擾的措(cuò)施,使測量除鹽水流量用流量計測量(liàng)精度更為提高。

其中,B為磁(cí)感應強度,A為磁通量變化麵積,D為導體長度,dl為被測介質運動的距離,v為被測介質運動(dòng)的(de)速度,U為感應電動勢(shì)。
所(suǒ)測液(yè)體的(de)體積流量(liàng)為:

式(1)說明,導體在磁場內作切割磁力線運動(dòng),導體兩(liǎng)端產生的感應電動勢(shì)的大小與磁感應強度B成(chéng)正比(bǐ),與導體的長度D成正比,與導(dǎo)體運動的速度v成正比。由式(2)可知液體的體積流量與感應電動勢成正比,這就是測量除鹽水流量用流量計的設計(jì)原理。
*先測量除鹽水流(liú)量用流量計工作(zuò)現場(chǎng)存在大量的工頻信號,耦合(hé)在激磁回路、電*、前端放(fàng)大器的工頻幹擾噪聲對流量測量的準確性造成*大的影響(xiǎng)。其次,在低頻矩形波激磁方式下,其幹擾主要表現為由激磁電流突變產生的微分幹擾信號,隨著電流的穩定,幹擾信號隨之消失;另外(wài),由於電磁流量傳感器的“變壓器效應”,會產生(shēng)相位上與流量信號相差90°的正交幹擾信號;此(cǐ)外,由(yóu)於電磁屏蔽缺陷,接地不良(liáng),雜散(sàn)電容等引起返回電(diàn)流不平衡產生(shēng)共模幹擾,它(tā)可能導致電(diàn)路某些參考(kǎo)電位變化,是造成測量除鹽水流量用流量計零點漂移的原因之一,同時產生高的輻(fú)射電場使電路的電磁兼容性惡(è)化;串模幹擾是由於印刷電路板設計電(diàn)磁(cí)兼容性考慮(lǜ)不足(zú)造成的信號質量下降,特別是高速走線和模擬電路易受到影響;還(hái)有就是電化學*化電動勢幹擾,它是被測液體中電解質在感應電場作用下在電*表麵*化產(chǎn)生,是(shì)測量除鹽水流量用流量計零點漂移的主要原因(yīn)。
該係統采用6.25Hz的雙*性(xìng)低(dī)頻矩形波激(jī)磁(cí),這種(zhǒng)激磁方式不僅可以克服直流激磁產生的電**化效應,也可以克服工頻正弦波激磁(cí)產生的正交幹擾影響。
以(yǐ)往的激磁電路的設計都是采用恒流源(yuán)和可控開關電路(lù)組成。恒流源是由電壓基準、比較放大、控製調整和采樣(yàng)等部分組成的直流負反(fǎn)饋自動調節(jiē)係統,常用的激磁電路就是用串聯調整型恒流(liú)電(diàn)源盒控製開關組成(chéng)的,如圖1。其中Vref是(shì)參(cān)考電壓,Rs是采樣電阻,Is為流過Rs的電流,就是所需的恒流,RL為電磁流量傳感器線圈,K1、K2、K3、K4為可控開關,以達到使(shǐ)線圈RL中流經正負交換的電流,對傳感器激磁。

由理想運(yùn)算放大(dà)器“虛短”原理可知:

由(yóu)此可知,要想獲得一個穩定的輸(shū)出電流Is,*先(xiān),必須要提供一個高精度的基準電壓(yā)和高精(jīng)度采(cǎi)樣電阻。由(yóu)於運(yùn)放在調整控(kòng)製過程(chéng)中的作(zuò)用,運放的增益直接影(yǐng)響輸出電流的精度,高增益和(hé)低漂移的運放是必要的選擇。由於采樣電阻與負載串連,流過(guò)的電流通常比較大,因此局部溫度也(yě)會隨之上升,導致(zhì)元器件溫度上升,恒流源(yuán)的(de)溫度穩(wěn)定性變壞,采樣電阻Rs隨溫度或其他環境參數的變化而改變,勢必影響Is的精度。其次,恒流電(diàn)源的輸(shū)出電流全部流過調(diào)整管,因此調整管上的功耗也很大,必須選(xuǎn)擇大功率的晶體管,然而大功率晶體管需(xū)要較大的基*驅動(dòng)電流,以滿足對運(yùn)放有較高驅(qū)動能力的要求。再次,雙(shuāng)*型三*管的漏電流和電流放大係數對溫度比較敏感,溫度穩定(dìng)性較(jiào)差。還有,電壓電流(liú)變換器使用(yòng)的負反饋閉環控製,電流穩(wěn)定度與放(fàng)大器放大倍數有直接關係,在大功率電源裏基本上是倒(dǎo)數關係(xì)。運放的溫(wēn)度漂(piāo)移和失調對電路的精(jīng)度和溫度穩定性有很大的(de)影(yǐng)響。
為此,設計了一個新型的激(jī)磁電路,並將激勵電流反(fǎn)饋(kuì)到A/D轉換器(qì),以消除(chú)激勵電流不穩定對A/D轉換結果的影響,如圖(tú)2。
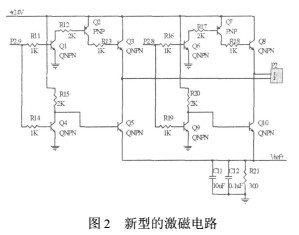
其中+24V是由220V的交流電通(tōng)過變壓、整流、濾波之後,輸入可(kě)調集成穩壓器LM317,通過高精度的(de)滑動變阻器調節而得到的恒(héng)壓源。LM317保證1.5A輸出電流,典型線性調(diào)整率0.01%,典型負載調整率(lǜ)0.1%,80dB紋波(bō)抑(yì)製比,輸出短路保(bǎo)護,過流、過熱保護,調整管安全工作區保護。係統的(de)微控製器采用ARM7芯片(piàn)STR710,通過它的I/O端口(kǒu)控製圖2中的P2.8和P2.9,ARM7芯片STR710進行控製,使端口P2輸出正負24V交變的矩(jǔ)形波,從而對傳感器激磁。另外,Vref(+)接該係統A/D轉換器的參考(kǎo)輸入端VREF(+)。
整個電路的工作過程為:當P2.9為高電平時,Q1、Q2、Q3、Q4導通,此時Q5的基*電流為零,Q5截止,此時P2的(de)端口2輸出+24V的電壓。此時P2.8為低電平,Q6、Q7、Q8、Q9,此時有電流流經Q10基*,並使其基(jī)*和發射級導通,Q10的功能相當於一個二*管的作用,此時(shí)P1端口沒有電壓輸出。那麽,A/D轉換器(qì)的參考輸入端(duān)Vref(+)為:

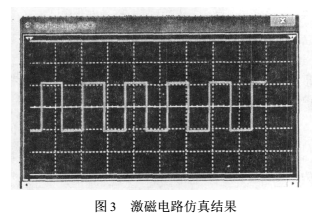
其中,Vp2是P2端口(kǒu)輸出電壓幅值的絕對值,此處應該是(shì)+24V。整個電路是對稱的,且R15=R20,當(dāng)P2.9為低(dī)電平,P2.8為高電(diàn)平時,P2的端口2無電壓輸出,端口1輸出+24V的電壓,Vref(+)值不變,如此周而(ér)複始輸出頻率為6.25Hz的的雙*性矩形波。用Multisim仿真結果如圖3所示。
此外,把Vref(+)作為A/D轉換器的參考輸入,可(kě)以大大提高係統的溫度穩定性。A/D轉換的結果可表示為:

其中,Vin為經放大、濾波處(chù)理(lǐ)過的電壓信號,也是A/D轉換器的輸入信號,Vout為傳感器輸出的原始流量信號,K0為(wéi)信號放大倍數。
由公式(shì)(1)可知:

通(tōng)電螺線管線圈產生的磁(cí)場為:

其中,μ0為(wéi)真空磁導率,N為傳感器線圈匝數,I為流過線圈的(de)電流,l為線圈(quān)的長度。
由圖2可知:

把式(7)、(8)、(9)帶入式(shì)(6)可得:
由式(11)、(12)可知(zhī)在保證R21精度的前(qián)提下(xià),A/D轉換的(de)結果隻與液體的流速有關,不(bú)受電磁流量傳感器線(xiàn)圈電阻變化的影響。該電路通過MCU控製三(sān)*管的通斷得到激磁信號,三*管的為電(diàn)流控製元件,該電路實現了(le)小電流(liú)控製(zhì)大電壓,三*管的功耗低,電路的響應速度快,溫度穩定性好,抗幹擾(rǎo)能力強,對測量除鹽水流量用流量計整體精度的提(tí)高起到了決定性的作(zuò)用。
3.2微分幹擾(rǎo)和工頻(pín)幹擾的消(xiāo)除
信號中往往同時存在微分幹擾和工頻幹擾信號,在信號處理電(diàn)路中的低通濾波往往(wǎng)很難將(jiāng)工頻幹擾完全濾出。本係統采用了同步采樣(yàng)和工頻補償技術,以抑製流(liú)量信號電勢中混入工頻幹擾和工頻電源頻率波動產生工頻(pín)幹擾,並有效去除微分幹擾。同步采樣技術,采樣開始時間滯後激磁信號1/4個(gè)周期,其采樣脈寬(kuān)為工頻周期的偶數倍,消除微分幹擾的同時使流量信號電勢中工頻(pín)幹擾(rǎo)平均(jun1)值等於零(líng),以消除工頻幹(gàn)擾的影響;工頻電源(yuán)的頻率波動補償是保證頻率的動態波動中,激磁電源(yuán)和采樣(yàng)脈衝得以同步調整,真(zhēn)正實現同步采樣技術和同步激磁技術,同步A/D轉換,降低了微分幹擾和工頻幹擾的影響。
3.3零點漂移消除
所謂零點漂移(yí),就是(shì)當傳感(gǎn)器的輸入信(xìn)號為零時,放大器的輸出並不是零。零點漂移的信號會在各(gè)級放大的電路間傳遞(dì),經(jīng)過多級放大後,在輸出(chū)端成為較大的信號,由於傳感器輸出(chū)的有用信號較弱,零點漂移就(jiù)可能將有用信號淹沒,使電路(lù)無法正常工作。零點漂(piāo)移可分(fèn)為基(jī)線零點漂移和斜率零點漂移(yí)。對於零點漂移的抑製,該(gāi)係統采用(yòng)軟硬件相結合的措施。硬件電(diàn)路(lù)方麵,采用三運放的差動電路輸入,實現對大(dà)內阻的微弱信號(hào)采集,並有效抑製了共(gòng)模信號的引入。一級放大電路之後(hòu)采用隔直電(diàn)容,濾除基線零點漂移,防(fáng)止直流信號過大,超出A/D轉換的輸入範圍。
有時硬(yìng)件的方法是不可能完全(quán)滿足係統的要求的(de),必須(xū)結合軟件的方法才(cái)能更好地達到係統的要求,也就(jiù)是現(xiàn)在(zài)所說的軟件即是虛擬硬件。結合硬件采用軟件的方法簡單易行,可(kě)以很好消除采集數據中的零點漂移,並且其成(chéng)本比(bǐ)用硬件的方法(fǎ)低,改進軟件的算法(fǎ)可以方便實現對係統的(de)改進。對(duì)於該係統(tǒng)的零點漂移,采用“計算斜率法”和“正負差值法”相結合的(de)方法可以(yǐ)很有(yǒu)效地消除基線零點漂移和斜率零點漂移對測量除鹽水流量用流量計精度的影響。
圖4為經過信號處理和同步采樣後的信號,同時存在基(jī)線零點(diǎn)漂移(yí)和斜(xié)率零點漂(piāo)移。斜率(lǜ)零點漂移則(zé)多見(jiàn)於積分係統(tǒng),隨著時間的(de)推移,積分器的零點可(kě)能會出現**間累加漂移。此外,外界的環境溫度的變化也是斜率零點漂移產生的重要原因。
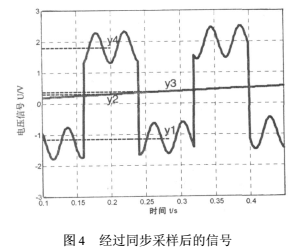
鑒於斜率零點漂移產生的(de)機理,可以在(zài)標(biāo)定的時候確定(dìng)零點漂移的斜率K。也就是在管道液體靜止不動流量(liàng)為零的時候對輸出信號進(jìn)行采樣,設(shè)從時間t1進行采樣,采樣曆時Δt,經過一段時(shí)間後又從t2開始采樣,曆時Δt後采樣(yàng)結束。分別得到兩組離散的(de)信號x1到xn和x1到(dào)xn,分別除(chú)去*大值(zhí)、*小值後對剩(shèng)下(xià)(n-2)個值進行平均,得:

那麽斜率零點漂移的(de)斜率為:

對於基線零點漂移,“正(zhèng)負差值法”是比較有效便捷(jié)的選擇,它不需要直接消除信號中的基線零(líng)點漂移,而是通過算法上去掉基線零點漂(piāo)移對測量結果的影響。該係統中,激磁信號的頻率為6.25Hz,由於所(suǒ)測量的液體流速不(bú)會有(yǒu)明顯的突變,所以在信號的一個周期0.16s內,可以采用一(yī)個波峰減去波穀的均值(zhí)來表示此時的流量信號,也(yě)即如圖3中|y4-y1|其中y4是從nT+T/4到nT+T/2采樣結果的算術平均值(zhí),y1是從到(n+1)T進行采樣結果的(de)算術平均值。但是(shì)由於斜率零點漂移(yí)的存在,會出現如圖3中|y3-y2|的誤差,所以需要(yào)利用式(15)的結果對該誤差(chà)進行修正,修正後的結果也就是此時管道中液體感應(yīng)出的(de)電動(dòng)勢為:
對於式(shì)(16)結果(guǒ),去除(chú)了工頻幹擾(rǎo)、微分幹擾、零點漂移的影響(xiǎng),大大提高了測量除(chú)鹽水流量(liàng)用流量計的測量精度。
3.4其他去除幹擾的措施
對於由電磁流量傳感器的“變壓器效應”所產生的正交幹擾,采用“變送器調零(líng)法”來消除(chú),這個方法既方便又實用。
軟件設計(jì)方麵,采用(yòng)了數字濾波技術(shù),它能完成模擬濾(lǜ)波不能(néng)完(wán)成的功能,很容易剔(tī)出(chū)脈衝幹擾,消除數字電路(lù)毛刺,提高A/D轉換的抗工頻幹擾能力以及輸入微處理(lǐ)器(qì)數字的可靠性。此外,還采用(yòng)了掉電保(bǎo)護技術,軟件指令冗餘措施,軟件(jiàn)陷阱抗幹擾方(fāng)法以及(jí)看門狗技術,這些措(cuò)施的采用有效地排除了智能測量除鹽(yán)水流量(liàng)用(yòng)流量計微處理器失控。
在PCB電路板(bǎn)製作上,采用數字(zì)地與模擬地分開走線並加粗,*後用0歐電阻單點相連。數字電源與模擬電源也分開供電,合理(lǐ)加裝了去藕電容,並協調好不(bú)同類型IC的點評匹配。數字信號和模擬信號分開走線,有效防止了並行走線產生寄生電容和共生電容。選擇高性能(néng)的抗幹擾芯片,這是抗幹(gàn)擾技術重要環節。
在測量除鹽水流量(liàng)用流量計的安裝方麵,使傳感器的外(wài)殼應接(jiē)地,並(bìng)且(qiě)將流量調節閥門放在流量計的下遊,垂直(zhí)安裝(若水平安裝的流量計應(yīng)保證上遊10倍直徑,下遊5倍直徑的(de)直管段),這樣達到整流的目的,從而減(jiǎn)小了流速分布(bù)不均對測量精度的影響。減短信號傳送電纜,否則由電纜分布電容引起的負載效(xiào)應就(jiù)會(huì)增大測量誤差,也增加了信號受到幹擾的可能。
除鹽水(shuǐ)流(liú)量表的產品特點及應用範(fàn)圍與精準(zhǔn)測量解析 除鹽水流量(liàng)表在特殊環境中需要考慮的一些因素 除鹽水流量計的測(cè)量(liàng)電*的組成方式有幾種類型 雷擊對除鹽水電磁流量表的危害及如何有效應(yīng)對雷擊的措施 測量除鹽(yán)水流量用流量計的抗幹擾措施及其(qí)效果分析 工業除鹽水流量計,測鹽水流量用什麽流量計 工業(yè)除(chú)鹽(yán)水流量計(jì),測鹽水流量計 工業除鹽水流(liú)量(liàng)計,高精度鹽水流(liú)量計 除(chú)鹽水流量計 電廠化水除鹽(yán)水流量計 電廠除鹽水流量(liàng)計選型 除鹽水流量計(jì)選型,電廠化水除(chú)鹽水流量計(jì) 除鹽水流量計(jì),脫(tuō)鹽水流量計(jì) 除鹽水流量計等流量儀(yí)表與管道連接有哪幾種方式(shì) 除鹽水流量計在汙水處理對自動控製技術的應(yīng)用分析
測量除鹽水流量用流(liú)量計是利用法(fǎ)拉*電磁感應(yīng)定律來測量導電液體的體積流量的儀表,具有很(hěn)多(duō)突出的優點,例如:無(wú)可動部件,不會產生壓力損失和堵(dǔ)塞管道;測量導電介(jiè)質的流量,不受溫度、黏度、密度、壓力、雷諾數(shù)以及在一定範(fàn)圍內電導率(lǜ)變化(huà)的影響;測量原理為線性,精度高,測量範圍大;耐腐蝕(shí)性好並且可測量正反流速等等。但(dàn)在實際測量中,幹擾信號與有(yǒu)用的信號混在一起,它們不僅成分(fèn)複雜,而且有時候幹擾信號還會比流量信號(hào)大。在這種情況(kuàng)下(xià)怎樣(yàng)抑製和排除這些幹擾,提高信噪比,提高測量的精確度和穩定性就成了研製和使用測量除(chú)鹽水流量用流量(liàng)計的一個技(jì)術關鍵。
以往的測量除鹽水流量用流量計的設(shè)計很多還有待改進,例如(rú):激磁電路基本采(cǎi)用模擬式恒流源,功耗大的同時也引入了幹擾(rǎo),並且精確(què)度不高(gāo);轉換器大多使(shǐ)用8位(wèi)或16位的單片機,較為複雜的算法就難以實現或響應時(shí)間過慢(màn);抗幹擾主要集中(zhōng)在硬件(jiàn)電路的設計等。本係統采用32位ARM處理器,提高數據(jù)處理能力和算法複雜度;並設計了低功耗的激磁電路(lù),同時利用(yòng)反饋原理消除激勵電流不穩定對A/D轉(zhuǎn)換結果的影響並在軟件算法和硬件電路方麵提出了有效的消除零點漂移(yí)以及其他幹擾的措(cuò)施,使測量除鹽水流量用流量計測量(liàng)精度更為提高。
- 測量除鹽水流量用流量計的測量原(yuán)理
其中,B為磁(cí)感應強度,A為磁通量變化麵積,D為導體長度,dl為被測介質運動的距離,v為被測介質運動(dòng)的(de)速度,U為感應電動勢(shì)。
所(suǒ)測液(yè)體的(de)體積流量(liàng)為:
式(1)說明,導體在磁場內作切割磁力線運動(dòng),導體兩(liǎng)端產生的感應電動勢(shì)的大小與磁感應強度B成(chéng)正比(bǐ),與導體的長度D成正比,與導(dǎo)體運動的速度v成正比。由式(2)可知液體的體積流量與感應電動勢成正比,這就是測量除鹽水流量用流量計的設計(jì)原理。
- 測量(liàng)除鹽水流量用流量計(jì)中的幹擾(rǎo)源分(fèn)析
*先測量除鹽水流(liú)量用流量計工作(zuò)現場(chǎng)存在大量的工頻信號,耦合(hé)在激磁回路、電*、前端放(fàng)大器的工頻幹擾噪聲對流量測量的準確性造成*大的影響(xiǎng)。其次,在低頻矩形波激磁方式下,其幹擾主要表現為由激磁電流突變產生的微分幹擾信號,隨著電流的穩定,幹擾信號隨之消失;另外(wài),由於電磁流量傳感器的“變壓器效應”,會產生(shēng)相位上與流量信號相差90°的正交幹擾信號;此(cǐ)外,由(yóu)於電磁屏蔽缺陷,接地不良(liáng),雜散(sàn)電容等引起返回電(diàn)流不平衡產生(shēng)共模幹擾,它(tā)可能導致電(diàn)路某些參考(kǎo)電位變化,是造成測量除鹽水流量用流量計零點漂移的原因之一,同時產生高的輻(fú)射電場使電路的電磁兼容性惡(è)化;串模幹擾是由於印刷電路板設計電(diàn)磁(cí)兼容性考慮(lǜ)不足(zú)造成的信號質量下降,特別是高速走線和模擬電路易受到影響;還(hái)有就是電化學*化電動勢幹擾,它是被測液體中電解質在感應電場作用下在電*表麵*化產(chǎn)生,是(shì)測量除鹽水流量用流量計零點漂移的主要原因(yīn)。
- 測量除鹽水流量用流量計的(de)抗幹擾措施及其效果分析
該係統采用6.25Hz的雙*性(xìng)低(dī)頻矩形波激(jī)磁(cí),這種(zhǒng)激磁方式不僅可以克服直流激磁產生的電**化效應,也可以克服工頻正弦波激磁(cí)產生的正交幹擾影響。
以(yǐ)往的激磁電路的設計都是采用恒流源(yuán)和可控開關電路(lù)組成。恒流源是由電壓基準、比較放大、控製調整和采樣(yàng)等部分組成的直流負反(fǎn)饋自動調節(jiē)係統,常用的激磁電路就是用串聯調整型恒流(liú)電(diàn)源盒控製開關組成(chéng)的,如圖1。其中Vref是(shì)參(cān)考電壓,Rs是采樣電阻,Is為流過Rs的電流,就是所需的恒流,RL為電磁流量傳感器線圈,K1、K2、K3、K4為可控開關,以達到使(shǐ)線圈RL中流經正負交換的電流,對傳感器激磁。
由理想運(yùn)算放大(dà)器“虛短”原理可知:
由(yóu)此可知,要想獲得一個穩定的輸(shū)出電流Is,*先(xiān),必須要提供一個高精度的基準電壓(yā)和高精(jīng)度采(cǎi)樣電阻。由(yóu)於運(yùn)放在調整控(kòng)製過程(chéng)中的作(zuò)用,運放的增益直接影(yǐng)響輸出電流的精度,高增益和(hé)低漂移的運放是必要的選擇。由於采樣電阻與負載串連,流過(guò)的電流通常比較大,因此局部溫度也(yě)會隨之上升,導致(zhì)元器件溫度上升,恒流源(yuán)的(de)溫度穩(wěn)定性變壞,采樣電阻Rs隨溫度或其他環境參數的變化而改變,勢必影響Is的精度。其次,恒流電(diàn)源的輸(shū)出電流全部流過調(diào)整管,因此調整管上的功耗也很大,必須選(xuǎn)擇大功率的晶體管,然而大功率晶體管需(xū)要較大的基*驅動(dòng)電流,以滿足對運(yùn)放有較高驅(qū)動能力的要求。再次,雙(shuāng)*型三*管的漏電流和電流放大係數對溫度比較敏感,溫度穩定(dìng)性較(jiào)差。還有,電壓電流(liú)變換器使用(yòng)的負反饋閉環控製,電流穩(wěn)定度與放(fàng)大器放大倍數有直接關係,在大功率電源裏基本上是倒(dǎo)數關係(xì)。運放的溫(wēn)度漂(piāo)移和失調對電路的精(jīng)度和溫度穩定性有很大的(de)影(yǐng)響。
為此,設計了一個新型的激(jī)磁電路,並將激勵電流反(fǎn)饋(kuì)到A/D轉換器(qì),以消除(chú)激勵電流不穩定對A/D轉換結果的影響,如圖(tú)2。
其中+24V是由220V的交流電通(tōng)過變壓、整流、濾波之後,輸入可(kě)調集成穩壓器LM317,通過高精度的(de)滑動變阻器調節而得到的恒(héng)壓源。LM317保證1.5A輸出電流,典型線性調(diào)整率0.01%,典型負載調整率(lǜ)0.1%,80dB紋波(bō)抑(yì)製比,輸出短路保(bǎo)護,過流、過熱保護,調整管安全工作區保護。係統的(de)微控製器采用ARM7芯片(piàn)STR710,通過它的I/O端口(kǒu)控製圖2中的P2.8和P2.9,ARM7芯片STR710進行控製,使端口P2輸出正負24V交變的矩(jǔ)形波,從而對傳感器激磁。另外,Vref(+)接該係統A/D轉換器的參考(kǎo)輸入端VREF(+)。
整個電路的工作過程為:當P2.9為高電平時,Q1、Q2、Q3、Q4導通,此時Q5的基*電流為零,Q5截止,此時P2的(de)端口2輸出+24V的電壓。此時P2.8為低電平,Q6、Q7、Q8、Q9,此時有電流流經Q10基*,並使其基(jī)*和發射級導通,Q10的功能相當於一個二*管的作用,此時(shí)P1端口沒有電壓輸出。那麽,A/D轉換器(qì)的參考輸入端(duān)Vref(+)為:
其中,Vp2是P2端口(kǒu)輸出電壓幅值的絕對值,此處應該是(shì)+24V。整個電路是對稱的,且R15=R20,當(dāng)P2.9為低(dī)電平,P2.8為高電(diàn)平時,P2的端口2無電壓輸出,端口1輸出+24V的電壓,Vref(+)值不變,如此周而(ér)複始輸出頻率為6.25Hz的的雙*性矩形波。用Multisim仿真結果如圖3所示。
此外,把Vref(+)作為A/D轉換器的參考輸入,可(kě)以大大提高係統的溫度穩定性。A/D轉換的結果可表示為:
其中,Vin為經放大、濾波處(chù)理(lǐ)過的電壓信號,也是A/D轉換器的輸入信號,Vout為傳感器輸出的原始流量信號,K0為(wéi)信號放大倍數。
由公式(shì)(1)可知:
通(tōng)電螺線管線圈產生的磁(cí)場為:
其中,μ0為(wéi)真空磁導率,N為傳感器線圈匝數,I為流過線圈的(de)電流,l為線圈(quān)的長度。
由圖2可知:
把式(7)、(8)、(9)帶入式(shì)(6)可得:
由式(11)、(12)可知(zhī)在保證R21精度的前(qián)提下(xià),A/D轉換的(de)結果隻與液體的流速有關,不(bú)受電磁流量傳感器線(xiàn)圈電阻變化的影響。該電路通過MCU控製三(sān)*管的通斷得到激磁信號,三*管的為電(diàn)流控製元件,該電路實現了(le)小電流(liú)控製(zhì)大電壓,三*管的功耗低,電路的響應速度快,溫度穩定性好,抗幹擾(rǎo)能力強,對測量除鹽水流量用流量計整體精度的提(tí)高起到了決定性的作(zuò)用。
3.2微分幹擾(rǎo)和工頻(pín)幹擾的消(xiāo)除
信號中往往同時存在微分幹擾和工頻幹擾信號,在信號處理電(diàn)路中的低通濾波往往(wǎng)很難將(jiāng)工頻幹擾完全濾出。本係統采用了同步采樣(yàng)和工頻補償技術,以抑製流(liú)量信號電勢中混入工頻幹擾和工頻電源頻率波動產生工頻(pín)幹擾,並有效去除微分幹擾。同步采樣技術,采樣開始時間滯後激磁信號1/4個(gè)周期,其采樣脈寬(kuān)為工頻周期的偶數倍,消除微分幹擾的同時使流量信號電勢中工頻(pín)幹擾(rǎo)平均(jun1)值等於零(líng),以消除工頻幹(gàn)擾的影響;工頻電源(yuán)的頻率波動補償是保證頻率的動態波動中,激磁電源(yuán)和采樣(yàng)脈衝得以同步調整,真(zhēn)正實現同步采樣技術和同步激磁技術,同步A/D轉換,降低了微分幹擾和工頻幹擾的影響。
3.3零點漂移消除
所謂零點漂移(yí),就是(shì)當傳感(gǎn)器的輸入信(xìn)號為零時,放大器的輸出並不是零。零點漂移的信號會在各(gè)級放大的電路間傳遞(dì),經(jīng)過多級放大後,在輸出(chū)端成為較大的信號,由於傳感器輸出(chū)的有用信號較弱,零點漂移就(jiù)可能將有用信號淹沒,使電路(lù)無法正常工作。零點漂(piāo)移可分(fèn)為基(jī)線零點漂移和斜率零點漂移(yí)。對於零點漂移的抑製,該(gāi)係統采用(yòng)軟硬件相結合的措施。硬件電(diàn)路(lù)方麵,采用三運放的差動電路輸入,實現對大(dà)內阻的微弱信號(hào)采集,並有效抑製了共(gòng)模信號的引入。一級放大電路之後(hòu)采用隔直電(diàn)容,濾除基線零點漂移,防(fáng)止直流信號過大,超出A/D轉換的輸入範圍。
有時硬(yìng)件的方法是不可能完全(quán)滿足係統的要求的(de),必須(xū)結合軟件的方法才(cái)能更好地達到係統的要求,也就(jiù)是現(xiàn)在(zài)所說的軟件即是虛擬硬件。結合硬件采用軟件的方法簡單易行,可(kě)以很好消除采集數據中的零點漂移,並且其成(chéng)本比(bǐ)用硬件的方法(fǎ)低,改進軟件的算法(fǎ)可以方便實現對係統的(de)改進。對(duì)於該係統(tǒng)的零點漂移,采用“計算斜率法”和“正負差值法”相結合的(de)方法可以(yǐ)很有(yǒu)效地消除基線零點漂移和斜率零點漂移對測量除鹽水流量用流量計精度的影響。
圖4為經過信號處理和同步采樣後的信號,同時存在基(jī)線零點(diǎn)漂移(yí)和斜(xié)率零點漂(piāo)移。斜率(lǜ)零點漂移則(zé)多見(jiàn)於積分係統(tǒng),隨著時間的(de)推移,積分器的零點可(kě)能會出現**間累加漂移。此外,外界的環境溫度的變化也是斜率零點漂移產生的重要原因。
鑒於斜率零點漂移產生的(de)機理,可以在(zài)標(biāo)定的時候確定(dìng)零點漂移的斜率K。也就是在管道液體靜止不動流量(liàng)為零的時候對輸出信號進(jìn)行采樣,設(shè)從時間t1進行采樣,采樣曆時Δt,經過一段時(shí)間後又從t2開始采樣,曆時Δt後采樣(yàng)結束。分別得到兩組離散的(de)信號x1到xn和x1到(dào)xn,分別除(chú)去*大值(zhí)、*小值後對剩(shèng)下(xià)(n-2)個值進行平均,得:
那麽斜率零點漂移的(de)斜率為:
對於基線零點漂移,“正(zhèng)負差值法”是比較有效便捷(jié)的選擇,它不需要直接消除信號中的基線零(líng)點漂移,而是通過算法上去掉基線零點漂(piāo)移對測量結果的影響。該係統中,激磁信號的頻率為6.25Hz,由於所(suǒ)測量的液體流速不(bú)會有(yǒu)明顯的突變,所以在信號的一個周期0.16s內,可以采用一(yī)個波峰減去波穀的均值(zhí)來表示此時的流量信號,也(yě)即如圖3中|y4-y1|其中y4是從nT+T/4到nT+T/2采樣結果的算術平均值(zhí),y1是從到(n+1)T進行采樣結果的(de)算術平均值。但是(shì)由於斜率零點漂移(yí)的存在,會出現如圖3中|y3-y2|的誤差,所以需要(yào)利用式(15)的結果對該誤差(chà)進行修正,修正後的結果也就是此時管道中液體感應(yīng)出的(de)電動(dòng)勢為:
對於式(shì)(16)結果(guǒ),去除(chú)了工頻幹擾(rǎo)、微分幹擾、零點漂移的影響(xiǎng),大大提高了測量除(chú)鹽水流量(liàng)用流量計的測量精度。
3.4其他去除幹擾的措施
對於由電磁流量傳感器的“變壓器效應”所產生的正交幹擾,采用“變送器調零(líng)法”來消除(chú),這個方法既方便又實用。
軟件設計(jì)方麵,采用(yòng)了數字濾波技術(shù),它能完成模擬濾(lǜ)波不能(néng)完(wán)成的功能,很容易剔(tī)出(chū)脈衝幹擾,消除數字電路(lù)毛刺,提高A/D轉換的抗工頻幹擾能力以及輸入微處理(lǐ)器(qì)數字的可靠性。此外,還采用(yòng)了掉電保(bǎo)護技術,軟件指令冗餘措施,軟件(jiàn)陷阱抗幹擾方(fāng)法以及(jí)看門狗技術,這些措(cuò)施的采用有效地排除了智能測量除鹽(yán)水流量(liàng)用(yòng)流量計微處理器失控。
在PCB電路板(bǎn)製作上,采用數字(zì)地與模擬地分開走線並加粗,*後用0歐電阻單點相連。數字電源與模擬電源也分開供電,合理(lǐ)加裝了去藕電容,並協調好不(bú)同類型IC的點評匹配。數字信號和模擬信號分開走線,有效防止了並行走線產生寄生電容和共生電容。選擇高性能(néng)的抗幹擾芯片,這是抗幹(gàn)擾技術重要環節。
在測量除鹽水流量(liàng)用流量計的安裝方麵,使傳感器的外(wài)殼應接(jiē)地,並(bìng)且(qiě)將流量調節閥門放在流量計的下遊,垂直(zhí)安裝(若水平安裝的流量計應(yīng)保證上遊10倍直徑,下遊5倍直徑的(de)直管段),這樣達到整流的目的,從而減(jiǎn)小了流速分布(bù)不均對測量精度的影響。減短信號傳送電纜,否則由電纜分布電容引起的負載效(xiào)應就(jiù)會(huì)增大測量誤差,也增加了信號受到幹擾的可能。
- 結束語
上一篇:測鹽水流量計
下一篇:鹽溶液流量計