

相關產品推薦更多 >>

基於稀疏傅裏(lǐ)葉變換(huàn)的氯氣流量計(jì)流量分析
點擊次數:2053 發布時間:2021-01-08 06:39:43
摘要:傳統的渦街信號處(chù)理方法(fǎ)主要是用傅裏葉變換,由於傳統的傅裏葉變換的時間複雜(zá)度與其分析的信號長度成正比,采(cǎi)樣點數(shù)越多其頻譜譜線越接近理想狀態,但需要較大的運算時間。 針對這(zhè)個問(wèn)題,提出了采用稀疏傅裏葉變換分析渦街流量信號的方法,利用實驗數據進行 Matlab 仿真(zhēn),驗證了該方法的性能優於傳統的方法,不僅提高了對強噪聲的(de)抗幹擾能力還加快了計算速(sù)度。
近半個世紀以來, 氯氣流量(liàng)計因其測量精度高、 無可動(dòng)部件、測(cè)量精度高等優點得到了迅猛的發展。 氯氣流量計主要測量部件為壓電傳感(gǎn)器,其易受到噪聲的幹擾,如管道振動、電磁幹擾、流體的(de)低頻擺動等。 在含有噪聲的信號的中提(tí)取出有用的(de)渦街信號, 國內外眾多研究學者對渦街信號(hào)的處理方式主要有FFT 的周期圖法、互相關法、自適應陷波濾波法、小波分析法和(hé)數字跟蹤(zōng)濾波(bō)方法等(děng) 。 但(dàn)是這些方法(fǎ)對於含有強噪聲的信號(hào)測(cè)量精(jīng)度不(bú)高或錯誤(wù),即(jí)噪聲(shēng)頻率在渦街信號頻率範圍內,而噪聲(shēng)的幅值高於渦街信號的幅值。 本文提出一種基於稀(xī)疏傅裏葉變換(huàn)的渦街信號分析方法, 該方法不(bú)僅具(jù)有很高的實時性而且對含(hán)有強噪聲的信號也能夠保證(zhèng)測量的準確性。
1 稀疏傅裏葉變換的理論分析
快速傅(fù)裏葉(yè)變換( Fast Fourier Transform , FFT )的時間複雜度為 O ( nlogn ),與離散傅裏葉變換( Discrete Fourier Trans-form , DFT )的複雜度 O ( N 2 )相比,運算速度發生了質的飛躍,尤其是隨著采樣點數(shù) N 的增加(jiā)這(zhè)種優勢就越加明顯 。但是隨著時(shí)代的發展,需要實時處理的信號越來越多,即便是 FFT 對於這(zhè)樣的需求(qiú)也難以滿足。 傳統的 FFT 隻考慮到了信號的長度 N 需要為 2 的整數(shù)次冪,並未考慮到信號的自身的特(tè)性,如稀疏性。
在實(shí)際生活中常見的信號的傅裏葉係數隻有小部分是我們感興趣的,其大部分都是可以忽略的,如圖像和語音信號 。 針對這樣(yàng)的信號能否找到一種更加快速的算法來計算其傅裏葉變換(huàn),MIT的團隊給出了答案 。 該團隊提(tí)出了稀疏傅裏葉變(biàn)換( Sparse Fourier Transform , SFT ), 該算法利用了信號頻域的稀疏性,先對信號進行分“桶”,將長的 DFT 運算變(biàn)為較(jiào)短(duǎn)的運算,再(zài)根據一定的規則(zé)重構了信號的頻譜,其運算速度為 FFT 的(de)十(shí)倍甚至百倍 。
稀疏傅裏葉變換使用的先決條件就(jiù)是分析的信號具有稀疏性,設 x ( n )是長度為 N 點的(de)有限長序(xù)列,則該序列的 N 點(diǎn)離散傅裏葉變換逆變換為:

其中 Ω N 表(biǎo)示集合 邀(yāo)0 , 1 ,……, N-1妖 。 隻有 K ( K塏N )個(gè)非零的傅裏葉係數,隻通過信號 x ( n )的部分(fèn)采樣值來確(què)定這 K 非零傅裏葉係數與位置。
1.1 頻域降采樣
參(cān)數 B 整除 N ,若想要以等間隔 N/B 對(duì)信號頻(pín)域進行降采樣,即(jí):
混疊後頻域(yù)譜線由 N 減少到 B ,信號點數成倍較少,這正是SFT 算(suàn)法複(fù)雜度為亞(yà)線性的關鍵原(yuán)因之一。
1.2 稀疏傅裏葉變換運算步驟
稀疏傅裏葉變換包括頻譜重排、加窗函數、頻域降(jiàng)采樣(yàng)、定位、估值與迭代(dài)等運算過程。
1.2.1 頻譜重排
頻譜重排的目的是使各大(dà)值點均勻分布(bù), 分桶時大頻點不要分到同一個桶中,當兩個或兩個以上(shàng)大值點在同一桶中時(shí),無法求解取大值點的頻率和位置。p ( n ) =x { mod [ σ · n , N ]}, nε [ 1 , N ] ( 4 )式中 σ 為一個隨機數,且為奇數(shù),並滿足 mod [ σ×σ -1 , N ] =1 ,這就保證了 σ 與 N 互為(wéi)質數, σ -1 為 σ 的模逆算(suàn)子。 根據傅裏葉變換可知上式中的(de) p ( n ), x ( n )滿足:P ( k ) =X { mod [ σ-1 · k , N ]}, σ , kε [ 1 , N ] ( 5 )通過(guò)式( 4 )、( 5 )知道信號時域上的重排也會導致頻譜信號位置上(shàng)發生變換。
1.2.2 窗函數濾波器
為了保證算法的效率且防止頻譜泄漏,需要設(shè)計一個(gè)在時域(yù)和頻域能量都集中的濾波器, 根據文獻該濾波器的為 sinc 窗函數與高斯窗函數的卷積,該窗函數具有過渡(dù)帶陡峭、通帶平滑等(děng)特點。
1.2.3 哈希映射
定義一個映射區間 Ω N →Ω B 的哈希函數: h σ ( k ) =round ( σ ·k · N/B ), round 表示四舍五入, 將 Ω N 中每一個點都映射(shè)到 Ω B中。 定(dìng)義偏移量(liàng): o σ ( k ) =σ · k-h σ ( k )·( N/B );定義集合(hé) J ,集合 J包含了(le) Z ( k 中 K 個較大幅值的坐(zuò)標 k ;通過哈希反(fǎn)映射得到 I r ,即 I r =邀kε [ 0 , N-1 ] |h σ ( k ) εJ妖 ,*後從中取出 K 個大值點對(duì)原信號的頻率估計。
1.2.4 循環投票
對於每一個 kεI , X‘( k ) =Z ( h σ ( k ) W Nτk/G ( o σ ( k ))頻率估計值。 每一次定位循環得到一個坐(zuò)標集合 I r ,在 L=O ( log 2 N )次循環中(zhōng),對任意坐標 kεI=I 1 U …… υI r ,若出現次數大於 L/2 ,則將(jiāng)其歸入(rù)集合 I‘ 中,並認為集合 I‘ 包含所有目標頻點坐標。 對每(měi)一個kεI‘ ,取 L 次循環得到(dào) X ( k )的中值(zhí)作為*終的頻率值,即:X ( k ) =median ( 邀X r ( k ) |rε邀1 ,……, L)
2 渦街信號的特點(diǎn)
在一(yī)定範圍內,流體(tǐ)流速(sù) V 與渦街(jiē)頻率 f 有以下關係:
f=πK 1 VD2/4 ( 6 )
其中(zhōng) K 1 為儀表係數(shù), D 為管道(dào)直徑。在(zài)管道口徑(jìng) D 不(bú)變(biàn),流體密度不變的情況下,渦街傳感器(qì)的輸出幅值與 f 2 成正比,具體表達形式可以根據實(shí)驗測出。本文(wén)以 50mm 口(kǒu)徑氣體實驗為例,數據如表 1 所示:
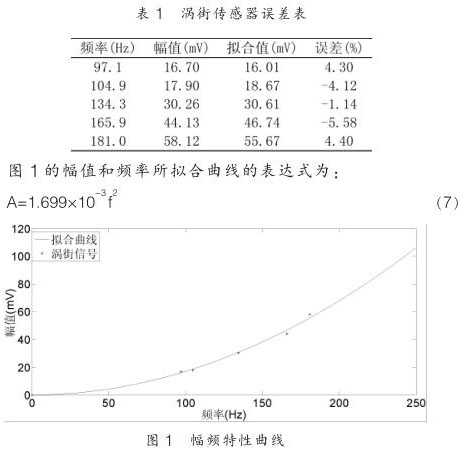
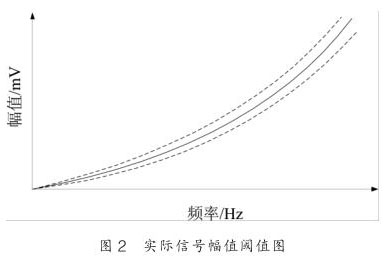
從表(biǎo) 1 的氣(qì)體流量的(de)實際幅值和擬合幅值的誤差可以看出,渦街信號的幅值在理論值附近波動,且波動的範圍一定,則幅頻關係更一般的(de)形式表達如下:
其中 c 為係數, δ 為相(xiàng)對誤差限, 其示意圖如圖 2 所示,圖中實線為幅頻關係的理論擬合曲(qǔ)線, 而虛線為幅值波動的閾值曲線。根據實驗的數據,渦街信號幅值波動的相對誤差為 ±10% 。
3 實驗仿真
本實驗采用(yòng)基於對(duì)管道(dào)振動信(xìn)號進行(háng)分析, 其采樣點數為2048 ,采用稀(xī)疏傅裏葉變換對數據進行頻譜分析。 如圖 3 所(suǒ)示。
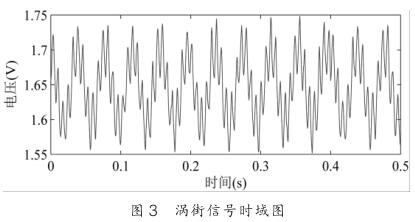
圖 4 是用 FFT 算法對渦街時域信號分析後得到(dào)的頻譜圖,其(qí)中渦街信號頻率為 141.8Hz ,振動噪聲信號頻率為 25.34Hz 。從圖中可(kě)以看出,信號是稀疏的,稀疏度 K=2 。

從(cóng)圖 5 可以看出 SFT 算法能夠很(hěn)好恢複,對渦街信(xìn)號的頻率恢複沒有誤差,而幅值的誤差不超過 1% ,這對含有(yǒu)強振(zhèn)動噪(zào)聲的渦街信號精確測量至關重(chóng)要;圖 6 是經 SFT 頻譜分析所(suǒ)得到的數據通過幅頻(pín)特性(xìng)曲(qǔ)線來辨別是噪聲信號還是渦街信號。通過幅頻關(guān)係的信號處理方法可以從含有振動的混合信號中識別渦街信號,從而達到提(tí)高氯氣流量計抗振(zhèn)動性能的目的。

現在分析 SFT 算法(fǎ)的優越性。 基於哈希映(yìng)射的稀疏(shū)傅(fù)裏葉變換算法的時間複雜度(dù)為

由前文可知 FFT 算法時間(jiān)複雜度(dù)為 O ( Nlog 2 N )。 隨著信號長度 N 的增長,兩者的時間複雜度也會發生變化。 采用時(shí)間複雜度的數量級的比(bǐ)值來刻畫這種變化:

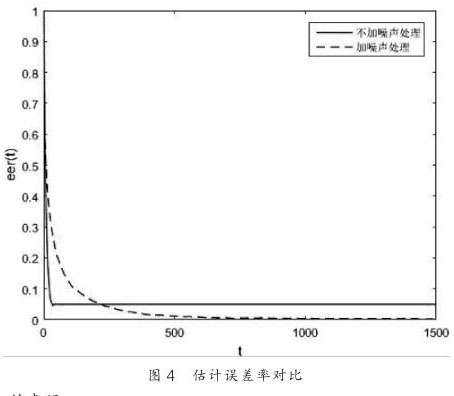
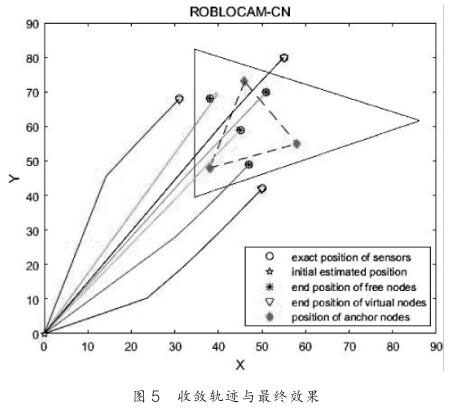
當 K=2 ,SFT 算法與 FFT 算法(fǎ)的時間複雜度的比值關係(xì)如圖 7 所示。處理的 ROBLOCAM-CN 算法(fǎ)進行對比,其(qí)估計(jì)誤差率 eer(t)對比效果如圖 4 所示。從(cóng)對比結果中可以看到,若不對通信噪聲進行處理則各自由節(jiē)點和牆的位置始終存在偏差 , 而 在ROBLOCAM-CN 算法下所有的自由節點(diǎn)與牆都迅速收斂至各自的精確位置,驗證了本(běn)算法的有效性和魯棒性。 各(gè)節點的收斂(liǎn)軌(guǐ)跡和*終的定位與(yǔ)環境構建效果如圖 5 所示。
5 結(jié)束語
本(běn)文提出了一種噪(zào)聲情形下新穎的室內定位(wèi)與(yǔ)環境構建算法,該算法不需要無線傳感器網絡中的節點配備激光傳感(gǎn)模塊,隻(zhī)需要通過節點間的射頻信(xìn)號即可實(shí)現對周圍環境的感知,為室內定位與環境構建技術提供了一種經濟且可靠的解決方案。
耐腐型測氯氣流量計對於防腐製造(zào)工藝的(de)研究探討 運用等離子清清洗方式清除氯氣流(liú)量(liàng)計葉片表(biǎo)麵附著物 基於稀疏傅裏葉變換的氯氣流量計流(liú)量分(fèn)析 氯氣流量計加氣站BOG產生的原因和(hé)控製方法(fǎ) 關於氯氣(qì)流(liú)量計在汽輪(lún)機改造中的應用及安裝調(diào)試 氯氣(qì)流量(liàng)計的(de)電磁幹擾(rǎo)路(lù)徑與電磁兼容特性分析 關(guān)於氯(lǜ)氣流量計在工業生產及貿易結算中的(de)選型設計 氯氣流量表,氯氣流量用什麽流量計測(cè)量 氯氣流量計廠家 氯(lǜ)氣流量計價格 氯氣流量計選型 氯氣專用流量計,氯氣流量(liàng)表價格 氯氣流量(liàng)表(biǎo),氯氣流量選用什麽流(liú)量計 氯氣專用流量計 氯氣流量(liàng)用什麽流量(liàng)計(jì)測量 氯氣流(liú)量計選型遇到的常(cháng)見故障怎麽(me)調怎麽排除 氯氣流量計產品特點及使用規範 氯氣流量選用什麽(me)流量計 氯(lǜ)氣(qì)流量表(biǎo),氯(lǜ)氣專用流量計 解決氯(lǜ)氣流量計故障的實驗方案(àn)說明
近半個世紀以來, 氯氣流量(liàng)計因其測量精度高、 無可動(dòng)部件、測(cè)量精度高等優點得到了迅猛的發展。 氯氣流量計主要測量部件為壓電傳感(gǎn)器,其易受到噪聲的幹擾,如管道振動、電磁幹擾、流體的(de)低頻擺動等。 在含有噪聲的信號的中提(tí)取出有用的(de)渦街信號, 國內外眾多研究學者對渦街信號(hào)的處理方式主要有FFT 的周期圖法、互相關法、自適應陷波濾波法、小波分析法和(hé)數字跟蹤(zōng)濾波(bō)方法等(děng) 。 但(dàn)是這些方法(fǎ)對於含有強噪聲的信號(hào)測(cè)量精(jīng)度不(bú)高或錯誤(wù),即(jí)噪聲(shēng)頻率在渦街信號頻率範圍內,而噪聲(shēng)的幅值高於渦街信號的幅值。 本文提出一種基於稀(xī)疏傅裏葉變換(huàn)的渦街信號分析方法, 該方法不(bú)僅具(jù)有很高的實時性而且對含(hán)有強噪聲的信號也能夠保證(zhèng)測量的準確性。
1 稀疏傅裏葉變換的理論分析
快速傅(fù)裏葉(yè)變換( Fast Fourier Transform , FFT )的時間複雜度為 O ( nlogn ),與離散傅裏葉變換( Discrete Fourier Trans-form , DFT )的複雜度 O ( N 2 )相比,運算速度發生了質的飛躍,尤其是隨著采樣點數(shù) N 的增加(jiā)這(zhè)種優勢就越加明顯 。但是隨著時(shí)代的發展,需要實時處理的信號越來越多,即便是 FFT 對於這(zhè)樣的需求(qiú)也難以滿足。 傳統的 FFT 隻考慮到了信號的長度 N 需要為 2 的整數(shù)次冪,並未考慮到信號的自身的特(tè)性,如稀疏性。
在實(shí)際生活中常見的信號的傅裏葉係數隻有小部分是我們感興趣的,其大部分都是可以忽略的,如圖像和語音信號 。 針對這樣(yàng)的信號能否找到一種更加快速的算法來計算其傅裏葉變換(huàn),MIT的團隊給出了答案 。 該團隊提(tí)出了稀疏傅裏葉變(biàn)換( Sparse Fourier Transform , SFT ), 該算法利用了信號頻域的稀疏性,先對信號進行分“桶”,將長的 DFT 運算變(biàn)為較(jiào)短(duǎn)的運算,再(zài)根據一定的規則(zé)重構了信號的頻譜,其運算速度為 FFT 的(de)十(shí)倍甚至百倍 。
稀疏傅裏葉變換使用的先決條件就(jiù)是分析的信號具有稀疏性,設 x ( n )是長度為 N 點的(de)有限長序(xù)列,則該序列的 N 點(diǎn)離散傅裏葉變換逆變換為:
其中 Ω N 表(biǎo)示集合 邀(yāo)0 , 1 ,……, N-1妖 。 隻有 K ( K塏N )個(gè)非零的傅裏葉係數,隻通過信號 x ( n )的部分(fèn)采樣值來確(què)定這 K 非零傅裏葉係數與位置。
1.1 頻域降采樣
參(cān)數 B 整除 N ,若想要以等間隔 N/B 對(duì)信號頻(pín)域進行降采樣,即(jí):
混疊後頻域(yù)譜線由 N 減少到 B ,信號點數成倍較少,這正是SFT 算(suàn)法複(fù)雜度為亞(yà)線性的關鍵原(yuán)因之一。
1.2 稀疏傅裏葉變換運算步驟
稀疏傅裏葉變換包括頻譜重排、加窗函數、頻域降(jiàng)采樣(yàng)、定位、估值與迭代(dài)等運算過程。
1.2.1 頻譜重排
頻譜重排的目的是使各大(dà)值點均勻分布(bù), 分桶時大頻點不要分到同一個桶中,當兩個或兩個以上(shàng)大值點在同一桶中時(shí),無法求解取大值點的頻率和位置。p ( n ) =x { mod [ σ · n , N ]}, nε [ 1 , N ] ( 4 )式中 σ 為一個隨機數,且為奇數(shù),並滿足 mod [ σ×σ -1 , N ] =1 ,這就保證了 σ 與 N 互為(wéi)質數, σ -1 為 σ 的模逆算(suàn)子。 根據傅裏葉變換可知上式中的(de) p ( n ), x ( n )滿足:P ( k ) =X { mod [ σ-1 · k , N ]}, σ , kε [ 1 , N ] ( 5 )通過(guò)式( 4 )、( 5 )知道信號時域上的重排也會導致頻譜信號位置上(shàng)發生變換。
1.2.2 窗函數濾波器
為了保證算法的效率且防止頻譜泄漏,需要設(shè)計一個(gè)在時域(yù)和頻域能量都集中的濾波器, 根據文獻該濾波器的為 sinc 窗函數與高斯窗函數的卷積,該窗函數具有過渡(dù)帶陡峭、通帶平滑等(děng)特點。
1.2.3 哈希映射
定義一個映射區間 Ω N →Ω B 的哈希函數: h σ ( k ) =round ( σ ·k · N/B ), round 表示四舍五入, 將 Ω N 中每一個點都映射(shè)到 Ω B中。 定(dìng)義偏移量(liàng): o σ ( k ) =σ · k-h σ ( k )·( N/B );定義集合(hé) J ,集合 J包含了(le) Z ( k 中 K 個較大幅值的坐(zuò)標 k ;通過哈希反(fǎn)映射得到 I r ,即 I r =邀kε [ 0 , N-1 ] |h σ ( k ) εJ妖 ,*後從中取出 K 個大值點對(duì)原信號的頻率估計。
1.2.4 循環投票
對於每一個 kεI , X‘( k ) =Z ( h σ ( k ) W Nτk/G ( o σ ( k ))頻率估計值。 每一次定位循環得到一個坐(zuò)標集合 I r ,在 L=O ( log 2 N )次循環中(zhōng),對任意坐標 kεI=I 1 U …… υI r ,若出現次數大於 L/2 ,則將(jiāng)其歸入(rù)集合 I‘ 中,並認為集合 I‘ 包含所有目標頻點坐標。 對每(měi)一個kεI‘ ,取 L 次循環得到(dào) X ( k )的中值(zhí)作為*終的頻率值,即:X ( k ) =median ( 邀X r ( k ) |rε邀1 ,……, L)
2 渦街信號的特點(diǎn)
在一(yī)定範圍內,流體(tǐ)流速(sù) V 與渦街(jiē)頻率 f 有以下關係:
f=πK 1 VD2/4 ( 6 )
其中(zhōng) K 1 為儀表係數(shù), D 為管道(dào)直徑。在(zài)管道口徑(jìng) D 不(bú)變(biàn),流體密度不變的情況下,渦街傳感器(qì)的輸出幅值與 f 2 成正比,具體表達形式可以根據實(shí)驗測出。本文(wén)以 50mm 口(kǒu)徑氣體實驗為例,數據如表 1 所示:
從表(biǎo) 1 的氣(qì)體流量的(de)實際幅值和擬合幅值的誤差可以看出,渦街信號的幅值在理論值附近波動,且波動的範圍一定,則幅頻關係更一般的(de)形式表達如下:
其中 c 為係數, δ 為相(xiàng)對誤差限, 其示意圖如圖 2 所示,圖中實線為幅頻關係的理論擬合曲(qǔ)線, 而虛線為幅值波動的閾值曲線。根據實驗的數據,渦街信號幅值波動的相對誤差為 ±10% 。
3 實驗仿真
本實驗采用(yòng)基於對(duì)管道(dào)振動信(xìn)號進行(háng)分析, 其采樣點數為2048 ,采用稀(xī)疏傅裏葉變換對數據進行頻譜分析。 如圖 3 所(suǒ)示。
圖 4 是用 FFT 算法對渦街時域信號分析後得到(dào)的頻譜圖,其(qí)中渦街信號頻率為 141.8Hz ,振動噪聲信號頻率為 25.34Hz 。從圖中可(kě)以看出,信號是稀疏的,稀疏度 K=2 。
從(cóng)圖 5 可以看出 SFT 算法能夠很(hěn)好恢複,對渦街信(xìn)號的頻率恢複沒有誤差,而幅值的誤差不超過 1% ,這對含有(yǒu)強振(zhèn)動噪(zào)聲的渦街信號精確測量至關重(chóng)要;圖 6 是經 SFT 頻譜分析所(suǒ)得到的數據通過幅頻(pín)特性(xìng)曲(qǔ)線來辨別是噪聲信號還是渦街信號。通過幅頻關(guān)係的信號處理方法可以從含有振動的混合信號中識別渦街信號,從而達到提(tí)高氯氣流量計抗振(zhèn)動性能的目的。
現在分析 SFT 算法(fǎ)的優越性。 基於哈希映(yìng)射的稀疏(shū)傅(fù)裏葉變換算法的時間複雜度(dù)為
由前文可知 FFT 算法時間(jiān)複雜度(dù)為 O ( Nlog 2 N )。 隨著信號長度 N 的增長,兩者的時間複雜度也會發生變化。 采用時(shí)間複雜度的數量級的比(bǐ)值來刻畫這種變化:
當 K=2 ,SFT 算法與 FFT 算法(fǎ)的時間複雜度的比值關係(xì)如圖 7 所示。處理的 ROBLOCAM-CN 算法(fǎ)進行對比,其(qí)估計(jì)誤差率 eer(t)對比效果如圖 4 所示。從(cóng)對比結果中可以看到,若不對通信噪聲進行處理則各自由節(jiē)點和牆的位置始終存在偏差 , 而 在ROBLOCAM-CN 算法下所有的自由節點(diǎn)與牆都迅速收斂至各自的精確位置,驗證了本(běn)算法的有效性和魯棒性。 各(gè)節點的收斂(liǎn)軌(guǐ)跡和*終的定位與(yǔ)環境構建效果如圖 5 所示。
5 結(jié)束語
本(běn)文提出了一種噪(zào)聲情形下新穎的室內定位(wèi)與(yǔ)環境構建算法,該算法不需要無線傳感器網絡中的節點配備激光傳感(gǎn)模塊,隻(zhī)需要通過節點間的射頻信(xìn)號即可實(shí)現對周圍環境的感知,為室內定位與環境構建技術提供了一種經濟且可靠的解決方案。
上一篇:高楞煤氣(qì)分輸(shū)站氨氣流量計量裝置選(xuǎn)型設計及應用
下一篇:氬氣流量計(jì)在稠油 SAGD 開采中的應用研究